Energy Harvesting and Energy Efficient Control for Variable Impedance Actuators
The thesis aims at improving energy efficiency of compliant actuators from a new perspective, by incorporating energy harvesting technology. Energy efficiency is a crucial issue towards long-term deployment of compliant robots in the real world. In the context of variable impedance actuators (VIAs), one of the main focuses has been on improving energy efficiency through reduction of energy consumption. However, the harvesting of dissipated energy in such systems remains underexplored.
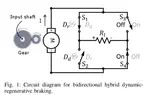
The first part of the thesis proposes a novel variable damping module design enabling energy regeneration in VIAs by exploiting the regenerative braking effect of DC motors. The proposed damping module uses four switches to combine regenerative and dynamic braking, in a hybrid approach that enables energy regeneration without reduction in the range of damping achievable. Numerical simulations and a physical experiment were conducted in which the proposed module shows an optimal trade-off between task-performance and energy efficiency.
In addition, to investigate the role of variable regenerative damping in terms of energy efficiency of long-term operation, experiments are reported in which the VIA, equipped with the proposed damping module, performs sequential reaching to a series of stochastic targets. The results indicate that the combination of variable stiffness and variable regenerative damping results in a 25% performance improvement on metrics incorporating reaching accuracy, settling time, energy consumption and regeneration over comparable schemes where either stiffness or damping are fixed.
Next, to consider non-periodic but sequential tasks, instead of optimizing the whole problem, we propose to treat the movement as a sequential combination of sub-movements and establish a bi-level framework. Low-level optimal control of 2 subtasks is encapsulated in an outer loop of policy improvement to enable highlevel optimization w.r.t. realistic energy cost estimators. The proposed method is able to (i) exploit variable physical impedance, (ii) tune efficiency balance via control cost weighting, (iii) optimize movement timing. The effectiveness is verified by two consecutive reaching tasks, and significant energy saving is demonstrated by simulation and measurement on hardware.
吳璠
Associate Professor at Shanghai University
My research interests include robot skill learning, energy efficient robotic system, behaviour-based robot systems.