Fan WU
Fan WU
Home
News
Projects
Featured
Publications
Posts
Contact
Light
Dark
Automatic
Publications
Type
Preprint
Journal article
Conference paper
Thesis
Date
2026
2025
2024
2023
2022
2020
2018
Video-to-BT: Generating Reactive Behavior Trees from Human Demonstration Videos for Robotic Assembly
Xiwei Zhao
,
Yiwei Wang
,
Yansong Wu
,
Fan Wu
,
Teng Sun
,
Zhonghua Miao
,
Sami Haddadin
,
Alois Knoll
Cite
TacUMI: A Multi-Modal Universal Manipulation Interface for Contact-Rich Tasks
Tailai Cheng
,
Kejia Chen
,
Lingyun Chen
,
Liding Zhang
,
Yue Zhang
,
Yao Ling
,
Mahdi Hamad
,
Zhenshan Bing
,
Fan Wu
,
Karan Sharma
,
others
Cite
APT*: Asymptotically Optimal Motion Planning via Adaptively Prolated Elliptical R-Nearest Neighbors
IEEE Robotics and Automation Letters (RA-L)
Liding Zhang
,
Sicheng Wang
,
Kuanqi Cai
,
Zhenshan Bing
,
Fan Wu
,
Chaoqun Wang
,
Sami Haddadin
,
Alois Knoll
Cite
Project
DOI
Estimated Informed Anytime Search for Sampling-Based Planning via Adaptive Sampler
IEEE Transactions on Automation Science and Engineering
Liding Zhang
,
Kuanqi Cai
,
Yu Zhang
,
Zhenshan Bing
,
Chaoqun Wang
,
Fan Wu
,
Sami Haddadin
,
Alois Knoll
Cite
Project
DOI
CIT*: Context-Based Biased Batch-Sampling for Almost-Surely Asymptotically Optimal Motion Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
Liding Zhang, Yankun Wei, Kuanqi Cai, Zhenshan Bing, Yuan Meng, Fan Wu, Sami Haddadin, Alois Knoll
Cite
Project
Video
DOI
TacDiffusion: Force-domain Diffusion Policy for Precise Tactile Manipulation
2025 IEEE International Conference on Robotics and Automation (ICRA)
Yansong Wu
,
Zongxie Chen
,
Fan Wu
,
Lingyun Chen
,
Liding Zhang
,
Zhenshan Bing
,
Abdalla Swikir
,
Alois Knoll
,
Sami Haddadin
Cite
Code
Project
DOI
arXiv
LLM-as-BT-Planner: Leveraging LLMs for Behavior Tree Generation in Robot Task Planning
2025 IEEE International Conference on Robotics and Automation (ICRA)
Jicong Ao
,
Fan Wu
,
Yansong Wu
,
Abdalla Swikir
,
Sami Haddadin
Cite
Code
Project
DOI
arXiv
LEMMo-Plan: LLM-Enhanced Learning from Multi-Modal Demonstration for Planning Sequential Contact-Rich Manipulation Tasks
2025 IEEE International Conference on Robotics and Automation (ICRA)
Kejia Chen
,
Zheng Shen
,
Yue Zhang
,
Lingyun Chen
,
Fan Wu
,
Zhenshan Bing
,
Sami Haddadin
,
Alois Knoll
Cite
Project
DOI
arXiv
Project Page
Direction Informed Trees (DIT*): Optimal Path Planning Via Direction Filter and Direction Cost Heuristic
2025 IEEE International Conference on Robotics and Automation (ICRA).
Liding Zhang
,
Kejia Chen
,
Kuanqi Cai
,
Yu Zhang
,
Yixuan Dang
,
Yansong Wu
,
Zhenshan Bing
,
Fan Wu
,
Sami Haddadin
,
Alois Knoll
Cite
Project
DOI
Tree-Based Grafting Approach for Bidirectional Motion Planning with Local Subsets Optimization
IEEE Robotics and Automation Letters (RA-L)
Liding Zhang
,
Yao Ling
,
Zhenshan Bing
,
Fan Wu
,
Sami Haddadin
,
Alois Knoll
Cite
Project
DOI
Visuo-Tactile Exploration of Unknown Rigid 3D Curvatures by Vision-Augmented Unified Force-Impedance Control
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
Kübra Karacan
,
Anran Zhang
,
Hamid Sadeghian
,
Fan Wu
,
Sami Haddadin
Cite
Project
Project
Ontology Based AI Planning and Scheduling for Robotic Assembly
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
Jingyun Zhao
,
Birgit Vogel-Heuser
,
Jicong Ao
,
Yansong Wu
,
Liding Zhang
,
Fandi Bi
,
Dominik Hujo
,
Zhenshan Bing
,
Fan Wu
,
Alois Knoll
,
Sami Haddadin
,
Bernd Vojanec
,
Timo Markert
,
André Kraft
Cite
Project
Flexible Informed Trees (FIT*): Adaptive Batch-Size Approach in Informed Sampling-Based Path Planning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
Liding Zhang
,
Zhenshan Bing
,
Kejia Chen
,
Lingyun Chen
,
Kuanqi Cai
,
Yu Zhang
,
Fan Wu
,
Peter Krumbholz
,
Zhilin Yuan
,
Sami Haddadin
,
Alois Knoll
Cite
Project
arXiv
Elliptical K-Nearest Neighbors - Path Optimization via Coulomb's Law and Invalid Vertices in C-Space Obstacles
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
Liding Zhang
,
Zhenshan Bing
,
Yu Zhang
,
Kuanqi Cai
,
Lingyun Chen
,
Fan Wu
,
Sami Haddadin
,
Alois Knoll
Cite
Project
A Scalable Platform for Robot Learning and Physical Skill Data Collection
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
Samuel Schneider
,
Yansong Wu
,
Lars Johannsmeier
,
Fan Wu
,
Sami Haddadin
Cite
Project
DOI
Tactile-Morph Skills: Energy-Based Control Meets Data-Driven Learning
Anran Zhang
,
Kübra Karacan
,
Hamid Sadeghian
,
Yansong Wu
,
Fan Wu
,
Sami Haddadin
Cite
Project
Project
Tactile Robot Programming: Transferring Task Constraints into Constraint-Based Unified Force-Impedance Control
2024 IEEE International Conference on Robotics and Automation (ICRA)
Kübra Karacan
,
Robin Kirschner
,
Hamid Sadeghian
,
Fan Wu
,
Sami Haddadin
PDF
Cite
Project
Project
Real-time Contact State Estimation in Shape Control of Deformable Linear Objects under Small Environmental Constraints
2024 IEEE International Conference on Robotics and Automation (ICRA).
Kejia Chen
,
Zhenshan Bing
,
Yansong Wu
,
Fan Wu
,
Liding Zhang
,
Sami Haddadin
,
Alois Knoll
PDF
Cite
Project
Video
arXiv
Behavior Tree Generation using Large Language Models for Sequential Manipulation Planning with Human Instructions and Feedback
ICRA 2024 Workshop Exploring Role Allocation in Human-Robot Co-Manipulation
Jicong Ao
,
Yansong Wu
,
Fan Wu
,
Sami Haddadin
PDF
Cite
Code
Project
1 kHz Behavior Tree for Self-adaptable Tactile Insertion
2024 IEEE International Conference on Robotics and Automation (ICRA).
Yansong Wu
,
Fan Wu
,
Lingyun Chen
,
Kejia Chen
,
Samuel Schneider
,
Lars Johannsmeier
,
Zhenshan Bing
,
Fares Abu-Dakka
,
Alois Knoll
,
Sami Haddadin
PDF
Cite
Project
DOI
Digital Robot Judge (DR.J): Building a Task-Centric Performance Database of Real-World Manipulation with Electronic Task Boards
IEEE Robotics and Automation Magazine
Peter So
,
Andriy Sarabakha
,
Fan Wu
,
Utku Culha
,
Fares Abu-Dakka
,
Sami Haddadin
Cite
Project
Source Document
DOI
Competition Data
The Inherent Representation of Tactile Manipulation Using Unified Force-Impedance Control
2023 IEEE International Conference on Decision and Control (CDC).
Kübra Karacan
,
Robin Kirschner
,
Fan Wu
,
Hamid Sadeghian
,
Sami Haddadin
PDF
Cite
Project
Project
DOI
Individualized Training of Back Muscles Using Iterative Learning Control of a Compliant Balance Board
2023 International Conference on Rehabilitation Robotics (ICORR)
Elisabeth Jensen
,
Reihaneh Mirjalili
,
Kim Peper
,
Dennis Ossadnik
,
Fan Wu
,
Jan Lang
,
Matthias Martin
,
Florian Hetfleisch
,
Rainer Burgkart
,
Sami Haddadin
Cite
DOI
Contact-aware Shaping and Maintenance of Deformable Linear Objects With Fixtures
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Kejia Chen
,
Zhenshan Bing
,
Fan Wu
,
Yuan Meng
,
André Kraft
,
Sami Haddadin
,
Alois Knoll
PDF
Cite
Project
Video
DOI
Self-Organization and Collaboration in Robotic Manufacturing Systems
2023 IEEE 19th International Conference on Automation Science and Engineering (CASE)
Andreas Frotzscher
,
Xiao Chen
,
Duy Lam Tran
,
Thore Goll
,
Hamid Sadeghian
,
Fan Wu
,
Martin Dehmel
,
Tommy Wohlfahrt
,
Matthias Riedl
,
Sami Haddadin
Cite
Project
DOI
Tactile Exploration Using Unified Force-Impedance Control
2023 IFAC Word Congress on Automatic Control
Kübra Karacan
,
Divij Grover
,
Hamid Sadeghian
,
Fan Wu
,
Sami Haddadin
PDF
Cite
Project
Project
DOI
Learning optimal controllers: A dynamical motion primitive approach
22nd IFAC World Congress, 2023
Hugo T.M. Kussaba
,
Abdalla Swikir
,
Fan Wu
,
Sami Haddadin
PDF
Cite
Project
DOI
Learning dynamic robot-to-robot object handover
22nd IFAC World Congress, 2023
Yansong Wu
,
Lingyun Chen
,
Ignacio Perez Mahiques
,
Zhenshan Bing
,
Fan Wu
,
Alois Knoll
,
Sami Haddadin
PDF
Cite
Project
Video
DOI
On the Communication Channel in Bilateral Teleoperation: An Experimental Study for Ethernet, WiFi, LTE and 5G
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Xiao Chen
,
Lars Johannsmeier
,
Hamid Sadeghian
,
Erfan Shahriari
,
Martin Danneberg
,
Anselm Nicklas
,
Fan Wu
,
Gerhard Fettweis
,
Sami Haddadin
Cite
Project
DOI
BSA - Bi-Stiffness Actuation for Optimally Exploiting Intrinsic Compliance and Inertial Coupling Effects in Elastic Joint Robots
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Dennis Ossadnik
,
Mehmet C. Yildirim
,
Fan Wu
,
Abdalla Swikir
,
Hugo T. M. Kussaba
,
Saeed Abdolshah
,
Sami Haddadin
PDF
Cite
Project
DOI
Energy Regenerative Damping in Variable Impedance Actuators for Long-Term Robotic Deployment
IEEE Transactions on Robotics
Fan Wu
,
Matthew Howard
PDF
Cite
Project
Video
DOI
Exploiting Variable Impedance for Energy Efficient Sequential Movements
Compliant robotics have seen successful applications in energy efficient locomotion and cyclic manipulation. However, exploitation of …
Fan Wu
,
Matthew Howard
Cite
Project
arXiv
Energy Harvesting and Energy Efficient Control for Variable Impedance Actuators
Thesis
Fan Wu
Cite
Project
A Framework for Teaching Impedance Behaviours by Combining Human and Robot `Best Practice'
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Yuchen Zhao
,
Aran Sena
,
Fan Wu
,
Matthew J. Howard
PDF
Cite
Video
DOI
Embroidered Electrodes for Control of Affordable Myoelectric Prostheses
2018 IEEE International Conference on Robotics and Automation (ICRA)
Samuel Pitou
,
Fan Wu
,
Ali Shafti
,
Brendan Michael
,
Riaan Stopforth
,
Matthew Howard
Cite
Video
DOI
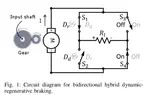
A Hybrid Dynamic-Regenerative Damping Scheme for Energy Regeneration in Variable Impedance Actuators
2018 IEEE International Conference on Robotics and Automation (ICRA)
Fan Wu
,
Matthew Howard
PDF
Cite
Project
Video
DOI
Cite
×