Fan WU
Fan WU
Home
News
Projects
Featured
Publications
Posts
Contact
Light
Dark
Automatic
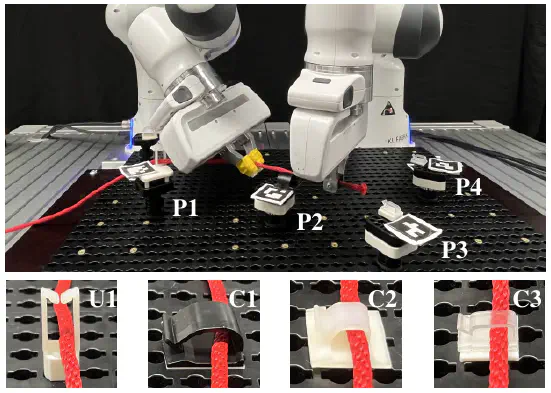
Real-time Contact State Estimation in Shape Control of Deformable Linear Objects under Small Environmental Constraints
Kejia Chen
,
Zhenshan Bing
,
Yansong Wu
,
Fan Wu
,
Liding Zhang
,
Sami Haddadin
,
Alois Knoll
May, 2024
PDF
Cite
Project
Video
arXiv
Type
Conference paper
Publication
IEEE International Conference on Robotics and Automation (ICRA)
ICRA2024
Cite
×