Fan WU
Fan WU
Home
News
Projects
Featured
Publications
Posts
Contact
Light
Dark
Automatic
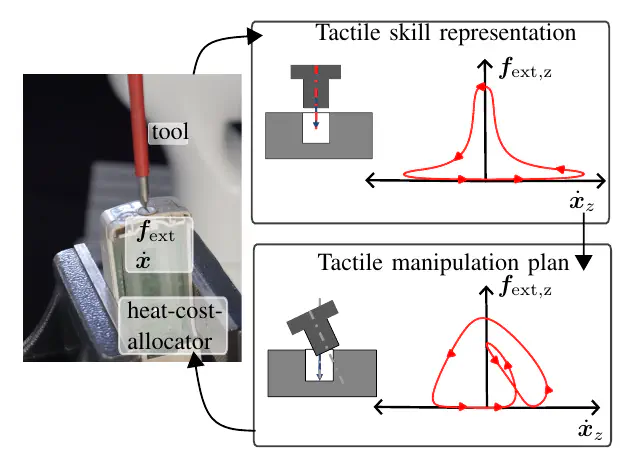
The Inherent Representation of Tactile Manipulation Using Unified Force-Impedance Control
Kübra Karacan
,
Robin Kirschner
,
Fan Wu
,
Hamid Sadeghian
,
Sami Haddadin
December, 2023
PDF
Cite
Project
Project
DOI
Type
Conference paper
Publication
IEEE Conference on Decision and Control (CDC)
Cite
×