Fan WU
Fan WU
Home
News
Projects
Featured
Publications
Posts
Contact
Light
Dark
Automatic
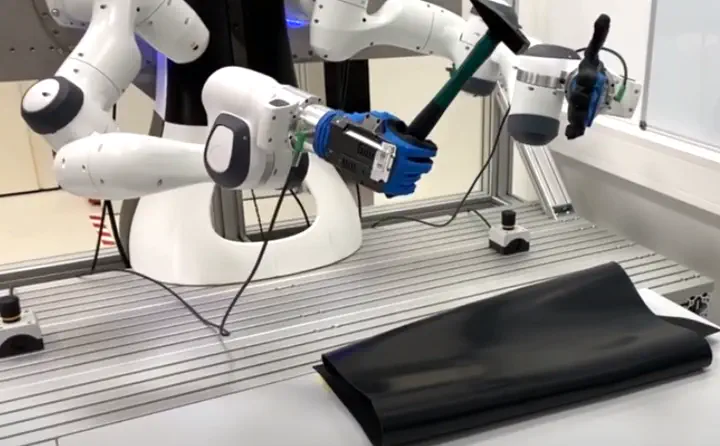
Learning dynamic robot-to-robot object handover
Yansong Wu
,
Lingyun Chen
,
Ignacio Perez Mahiques
,
Zhenshan Bing
,
Fan Wu
,
Alois Knoll
,
Sami Haddadin
January, 2023
PDF
Cite
Project
Video
DOI
Type
Journal article
Publication
IFAC-PapersOnLine
ifac2023
Cite
×