A Framework for Teaching Impedance Behaviours by Combining Human and Robot `Best Practice'
Abstract
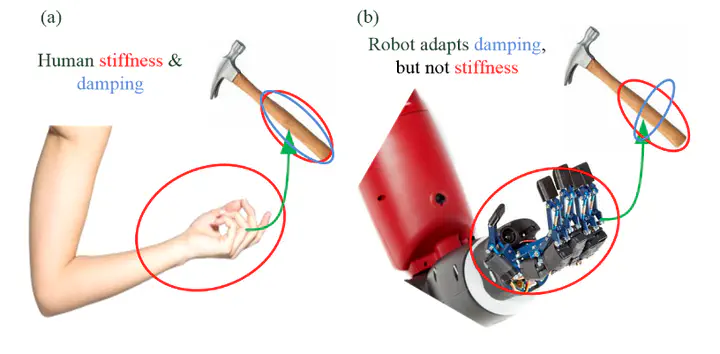
This paper presents a programming by demonstration framework for teaching impedance modulation using human demonstrations. Physiologically, human stiffness and damping are coupled at the muscle level, restricting the ability to modulate impedance according to task demands. Robotic systems often do not have this restriction (stiffness and damping can be varied independently), but the challenge is to devise an appropriate variable impedance profile for a given task. In this paper, the task critical component is first learned for imitation and a robot-specific controller is then blended into the control using the null space. In doing so, the control cheme takes advantage of both human and robot `best practice’. Experimental results on a physical robot suggest an order of magnitude better mean performance, with lower variance, can be achieved using the blended scheme.